

aixiv专栏是本站发布学术、技术内容的栏目。过去数年,本站aixiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
论文标题:NoisyGL: A Comprehensive Benchmark for Graph Neural Networks under Label Noise
论文地址:https://arxiv.org/pdf/2406.04299
项目地址:https://github.com/eaglelab-zju/NoisyGL
 ,其中 V 是包含所有 N 个节点的集合,
,其中 V 是包含所有 N 个节点的集合, 是边的集合。
是边的集合。 是邻接矩阵,
是邻接矩阵, 表示节点特征矩阵,特征的维度为 d 。每个节点都有⼀个真实标签,真实标签集合表示为
表示节点特征矩阵,特征的维度为 d 。每个节点都有⼀个真实标签,真实标签集合表示为 。
。 被分配了⽤于训练过程的标签,这部分标签表示为
被分配了⽤于训练过程的标签,这部分标签表示为 ,其中
,其中 是有标签节点的数量。其余的则是无标签节点,表示为
是有标签节点的数量。其余的则是无标签节点,表示为 。给定 X 和 A ,节点分类的⽬标是通过最小化
。给定 X 和 A ,节点分类的⽬标是通过最小化 来训练⼀个分类器
来训练⼀个分类器 ,其中 c 是类别数量,
,其中 c 是类别数量, 是衡量预测标签与真实标签之间差异的损失函数。
是衡量预测标签与真实标签之间差异的损失函数。 通常是⼀个设计良好的图神经网络。通过这种方式,根据经验风险最小化(Empirical Risk Minimization, ERM)原则,训练良好的节点分类器可以在未⻅数据
通常是⼀个设计良好的图神经网络。通过这种方式,根据经验风险最小化(Empirical Risk Minimization, ERM)原则,训练良好的节点分类器可以在未⻅数据 上实现泛化。
上实现泛化。 可能会受到标签噪声的污染,从而降低
可能会受到标签噪声的污染,从而降低 的泛化能力。我们将噪声标签表示为
的泛化能力。我们将噪声标签表示为 ,
, 即为其对应的真实标签。
即为其对应的真实标签。 的概率均匀地翻转到其他所有的类别。形式上,对于
的概率均匀地翻转到其他所有的类别。形式上,对于 ,我们有
,我们有 ,其中 c 表示类别数量。
,其中 c 表示类别数量。
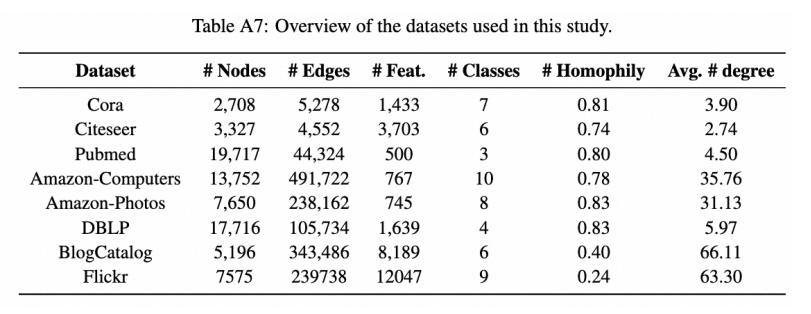
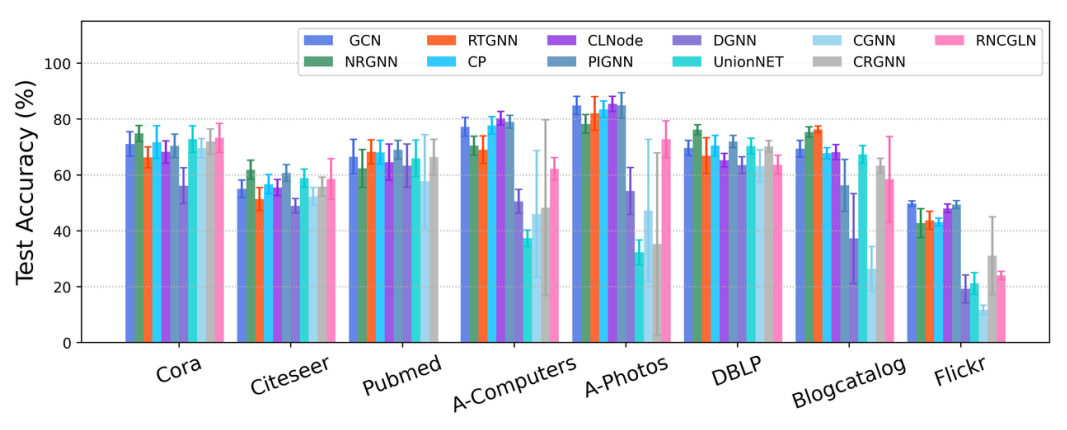

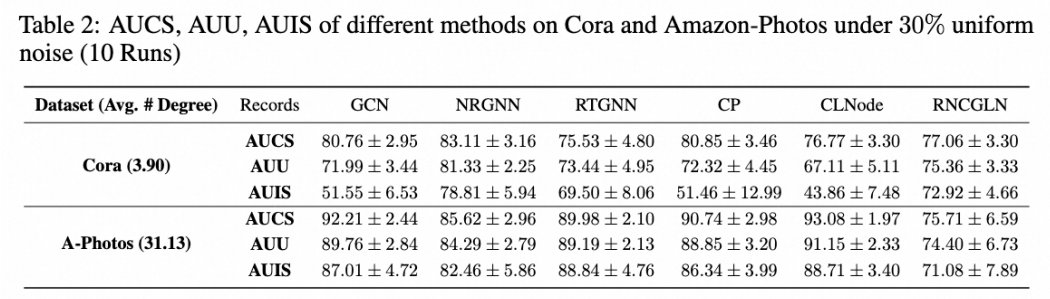
从 Table 2 中可以看出,标签噪声的传播效应在平均度较低的稀疏图(如 Cora、 Citeseer、Pubmed 和 DBLP)上非常严重,但在密集图(如 Amazon-Computers、 Amazon-Photos、Blogcatalog 和 Flickr)上则不明显。对此现象的解释是:稀疏图上的未标记节点在其邻域中通常只有有限数量的标注节点可用于监督,所以这些未标注节点的预测结果在很大程度上依赖于其邻域中有限的标注节点,如果这些节点被错误标注,则很容易导致未标注节点表示的错误学习。相比之下,对于密集图,未标注节点的邻域包含许多可以作为参考的标注节点。
以上就是NeurIPS 2024 | 标签噪声下图神经网络有了首个综合基准库,还开源的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 644
644






















