
邓龙江院士团队在多模态传感-视觉融合应用材料领域取得突破性进展,研发出一种新型离子凝胶,为具身智能机器人的发展奠定了坚实基础。该研究成果已发表于《先进科学》(advanced science)期刊。电子科技大学张林博研究员和医学院贾若男副教授为论文通讯作者,电子科技大学为论文第一完成单位。
该团队采用盐析诱导离子凝胶微相分离策略,成功合成了一种兼具优异力学性能、室温磷光寿命和离子电导率的离子凝胶。这种离子凝胶由富含离子液体(IL)的软相和富含聚合物的硬相构成,前者赋予其良好的拉伸性和离子传导性,后者则确保其能量耗散能力和聚集态磷光特性。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
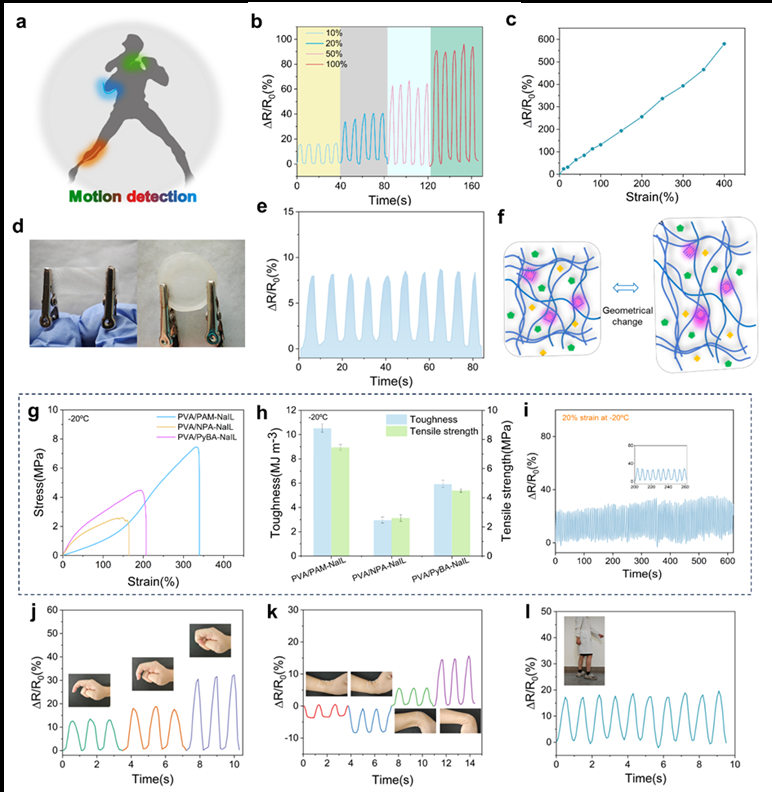
图1. (a) PVA/PAM-NaIL离子凝胶的离子成分使其具备优异的导电性和人体运动监测能力;(b) 10%、20%、50%和100%应变下的重复加载-卸载过程中的电阻相对变化;(c) 电阻随应变变化关系;(d) PVA/PAM-NaIL离子凝胶在拉伸(左)和压缩(右)应力下的电性能测试照片;(e) 连续压缩下的电阻相对变化;(f) 外部刺激对离子凝胶离子电导率影响机制;(g) 离子凝胶在-20°C下的应力-应变曲线;(h) -20°C下计算得到的韧性;(i) -20°C下20%压缩应变时循环加载和卸载过程中的相对电阻变化;(j) 手指运动、(k) 腕部弯曲和(l) 行走过程中的运动特征实时监测。
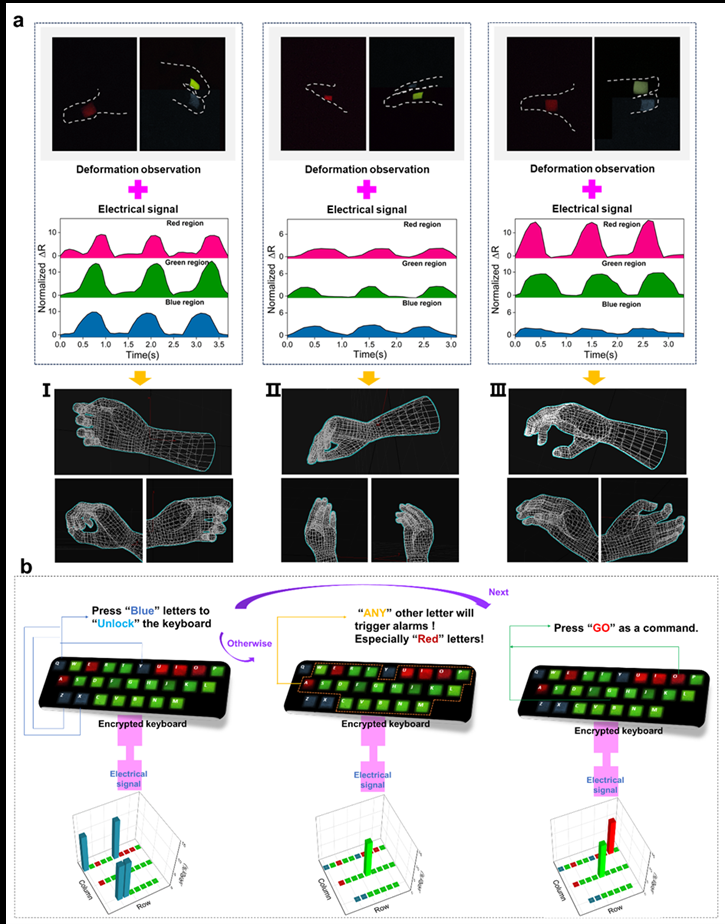
图2. (a) 基于协同双模预测策略,高精度模拟机器人手抓取状态,该策略结合了对不同磷光颜色区域变形视觉观察和抓取动作期间的电信号波动;(b) 紫外灯关闭后,多色余辉显示对键盘进行编码,结合打字时的电信号变化,构建高度安全的信息加密和传输系统。
该研究成果制备的亲肤电子传感器,有望广泛应用于人工智能、假肢、人机交互、虚拟现实和健康监测等领域,为下一代具身智能技术提供重要的研究支撑。该研究得到了国家自然科学基金群体项目的资助。
文章来源:电子科技大学
以上就是电子科技大学张林博研究员在多模态传感-视觉融合应用材料领域取得重要进展的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 867
867























