生成对抗网络(GAN)是深度学习领域中的一种新型神经网络结构,它的出现是为了解决传统生成模型中存在的判别性和鲁棒性不足的问题。它是由Alec Radford、Luke Metz和Soumith Chintala等人于2015年提出的,它的出现不仅对计算机视觉和自然语言处理等领域产生了广泛的应用,同时具有一定的理论意义,为人工智能发展开辟了一条新的思路。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

GAN的出现背景主要有以下几个方面:
传统生成模型的不足。在传统的生成模型中,如受限玻尔兹曼机(RBM)和变分自编码器(VAE)中,生成器和判别器的训练是分开进行的。因此,这些模型在生成高质量的真实数据方面效果有限,尤其是在处理大型高维数据集时更加困难。
提高生成模型的可操作性。 GAN通过使用对抗机制,将生成器与判别器结合在一起进行联合训练,使得生成器更加贴近真实数据分布,同时判别器也能够学习到如何区分真实数据和生成数据。这种可操作性使得GAN在实际应用中更加有用。
开拓深度学习的潜力。 GAN可以在生成新的、有用的数据分布上提供很强的性能。在数据少或者数据难以统计时,GAN可以生成能够有效替代部分真实数据的虚假数据,用以增加数据多样性和丰富性,帮助深度学习模型更好地学习到对数据的表示。
因此,GAN的提出不仅能够解决传统生成模型存在的问题,还开拓了深度学习的新方向,有着广泛的应用价值。
在GAN模型中,生成器和判别器的训练是同时进行的,因此GAN模型需要很大的计算代价。DCGAN通过使用卷积神经网络作为生成器和判别器的主干,利用卷积神经网络的特性将输入数据进行分层抽象和特征表示,从而减少了需要训练的参数,并提高了模型的效率和性能。
DCGAN因其在图像生成任务上的卓越表现而受到广泛关注和应用,它可以生成高质量的图像,比如自然图像、人脸图像、文字和艺术作品等。它的成功应用于图像生成、修改和转换凸显了GAN模型在计算机视觉领域潜在的应用价值。同时,DCGAN也为后续的研究和改进提供了思路和方法,如Wasserstein GAN、CycleGAN等的提出都是基于DCGAN的优点和不足展开的。
import paddleimport paddle.nn as nnimport paddle.vision.transforms as transformimport paddle.optimizer as optimimport paddle.vision.datasets as dsetimport numpy as npimport matplotlib.pyplot as pltimport warnings
warnings.filterwarnings("ignore")
place = paddle.CUDAPlace(0)
paddle.disable_static(place) # GPU动态图模式/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/__init__.py:107: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import MutableMapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/rcsetup.py:20: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Iterable, Mapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/colors.py:53: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Sized
# 数据准备dataset = dset.MNIST(mode = 'train',transform=transform.Compose([
transform.Resize((32,32)), # 图像缩放到(32,32)
transform.ToTensor(), # 转换格式为Tensor
transform.Normalize(mean=([127.5]),std=([127.5]),to_rgb= False) # 归一化到-1,1])
)for (img,label) in dataset: # 查看相应的维度
print(img) breakdataloader=paddle.io.DataLoader(dataset,places = paddle.CUDAPlace(0),batch_size=16,shuffle=True,drop_last=True)Tensor(shape=[1, 32, 32], dtype=float32, place=Place(gpu:0), stop_gradient=True,
[[[-1., -1., -1., ..., -1., -1., -1.],
[-1., -1., -1., ..., -1., -1., -1.],
[-1., -1., -1., ..., -1., -1., -1.],
...,
[-1., -1., -1., ..., -1., -1., -1.],
[-1., -1., -1., ..., -1., -1., -1.],
[-1., -1., -1., ..., -1., -1., -1.]]])神经网络的权值初始化是指在神经网络中给予权值一个初始值的过程。权值初始化的作用主要有以下几个方面:
避免交错误差信号梯度消失或爆炸的问题:神经网络在计算误差梯度时,需要通过链式法则将误差梯度反向传播到各层的权值上。如果权值的初始值不合适,误差梯度可能会积累并导致梯度消失或爆炸,使得神经网络不能进行有效的学习。合适的权值初始化可以使得误差信号向前或向后传递时变化适中,从而避免了这一问题。
加速收敛速度:权值的初始值不恰当会导致神经网络的学习过程较为缓慢,需要更多的迭代次数才能达到较为理想的效果。通过权值的合理初始化,可以缩短神经网络的训练时间,提高训练效率。
提高泛化性能:合适的权值初始化可以提高神经网络的泛化性能,即对新数据的预测能力。权值初始化会影响到神经网络中每个神经元的激活值,进而影响到整个神经网络的输出结果,因此权值初始化对神经网络的泛化性能具有重要的影响。
因此,权值初始化是神经网络中非常重要的一个环节,在应用神经网络时,应该根据网络结构和具体应用场景选择合适的权值初始化方法,从而提高神经网络的性能和应用效果。
# Weight initialization@paddle.no_grad()def normal(x,mean = 0,std = 1.):
value_temp = paddle.normal(mean,std,shape = x.shape) # 随机初始化权值
x.set_value(value_temp) return x@paddle.no_grad()def uniform(x,a = -1,b = 1):
value_temp = paddle.normal(min = a,max = b,shape = x.shape) #均匀分布初始化权值
x.set_value(value_temp) return x@paddle.no_grad() def kaiming(x):
value_temp = paddle.nn.KaimingNormal()
x.set_value(value_temp) return x@paddle.no_grad() def constant_(x,value_):
value_temp = paddle.full(x.shape,value_,x.dtype)
x.set_value(value_temp) return xdef weight_init(m):
classname = m.__class__.__name__ if hasattr(m, "weight") and classname.find("Conv2D") != -1:
normal(m.weight, 0.0, 0.02) elif hasattr(m, "weight") and classname.find("BatchNormal2D") != -1:
normal(m.weight,1.0,0.02)
constant_(m.bias,0) elif hasattr(m,"weight") and classname.find("ReLU") != -1:
kaiming(m.weight)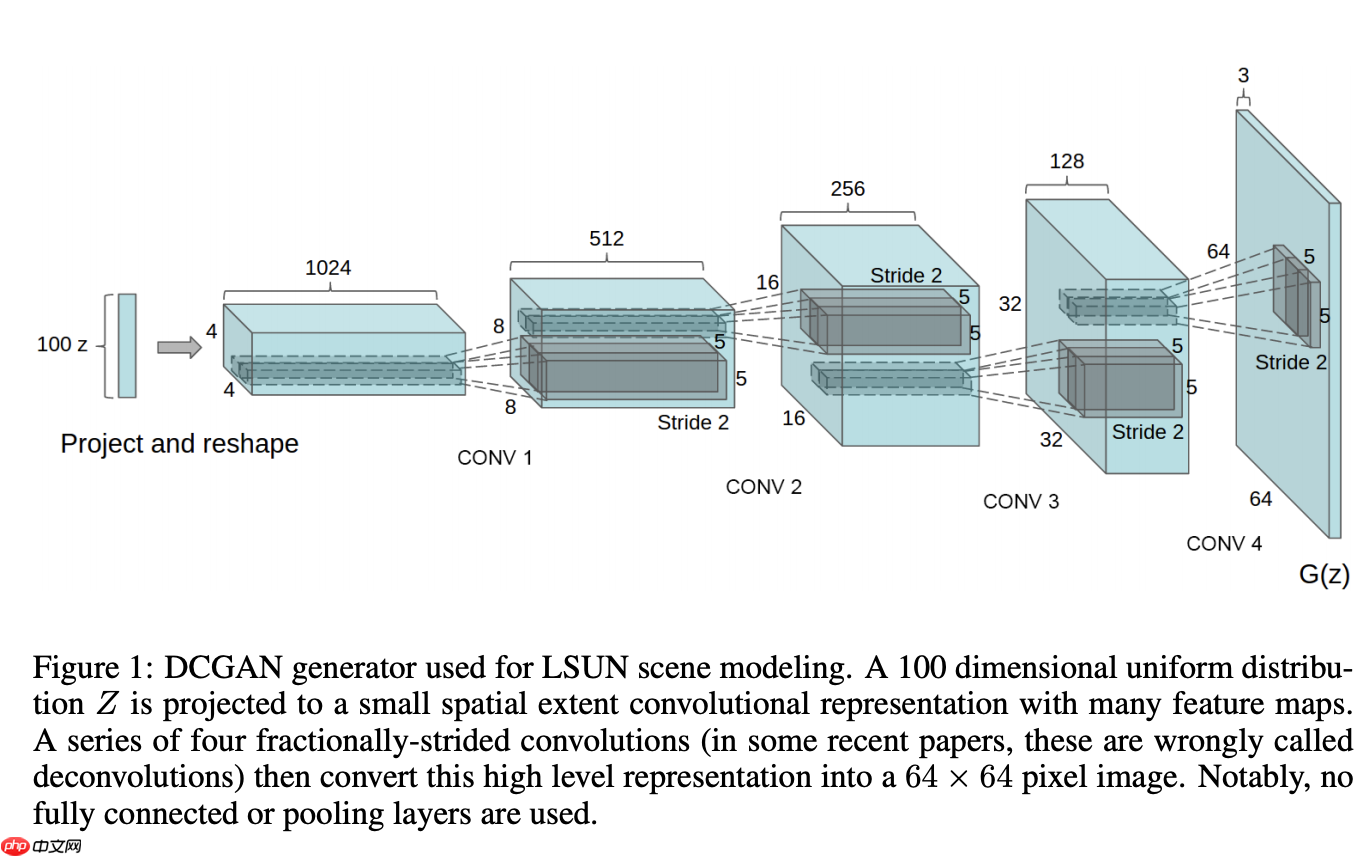
生成器是生成对抗网络(GAN)中的一个关键组件,它的目标是生成与真实数据分布相似的虚假数据,并尽可能地让这些数据被判别器误判为真实数据。生成器的具体目标可以被分解为两个方面:
最大程度地逼近真实数据分布:在训练过程中,生成器的目标是利用输入的随机噪声信号生成尽可能接近于真实数据的虚假数据,即最大程度地逼近真实数据分布。通过这样的训练方式,生成器可以学习到真实数据分布的特征和规律,从而模拟出与真实数据分布相似的虚假数据。
欺骗判别器:除了学习真实数据分布的特征之外,生成器还需要尽可能地让虚假数据与真实数据难以区分,即欺骗判别器,骗过它认为虚假数据是真实的。通过这样的训练方式,生成器可以不断完善自身的生成能力,在生成虚假数据的同时也提高了判别器识别真实数据与虚假数据的能力。
#class Generator(paddle.nn.Layer):
def __init__(self):
super(Generator,self).__init__()
self.gan = paddle.nn.Sequential( # input is Z, [B, 100, 1, 1] -> [B, 64 * 4, 4, 4]
nn.Conv2DTranspose(100,64*4,4,1,0),
nn.BatchNorm2D(64*4),
nn.ReLU(), # state size. [B, 64 * 4, 4, 4] -> [B, 64 * 2, 8, 8]
nn.Conv2DTranspose(64*4,64*2,4,2,1),
nn.BatchNorm2D(64*2),
nn.ReLU(), # state size. [B, 64 * 2, 8, 8] -> [B, 64, 16, 16]
nn.Conv2DTranspose(64*2,64,4,2,1),
nn.BatchNorm2D(64),
nn.ReLU(), # state size. [B, 64, 16, 16] -> [B, 1, 32, 32]
nn.Conv2DTranspose(64,1,4,2,1),
nn.Tanh(),
) def forward(self, inputs):
output = self.gan(inputs) return outputGnet = Generator() Gnet.apply(weight_init) # 权值初始化print(Gnet)
Generator(
(gan): Sequential(
(0): Conv2DTranspose(100, 256, kernel_size=[4, 4], data_format=NCHW)
(1): BatchNorm2D(num_features=256, momentum=0.9, epsilon=1e-05)
(2): ReLU()
(3): Conv2DTranspose(256, 128, kernel_size=[4, 4], stride=[2, 2], padding=1, data_format=NCHW)
(4): BatchNorm2D(num_features=128, momentum=0.9, epsilon=1e-05)
(5): ReLU()
(6): Conv2DTranspose(128, 64, kernel_size=[4, 4], stride=[2, 2], padding=1, data_format=NCHW)
(7): BatchNorm2D(num_features=64, momentum=0.9, epsilon=1e-05)
(8): ReLU()
(9): Conv2DTranspose(64, 1, kernel_size=[4, 4], stride=[2, 2], padding=1, data_format=NCHW)
(10): Tanh()
)
)判别器是生成对抗网络(GAN)中一个重要的组成部分,其主要目的是从真实数据集和生成器生成的假数据集中区分出那些是真实的数据,那些是生成的假数据。因此,判别器的目标是区分真实数据和假数据,并给出一个二分类的判别结果。GAN的训练过程中,判别器的损失函数通常采用交叉熵损失函数,目标是最小化判别器对真实样本和生成样本的分类误差,即在给定样本时,判别器输出真样本的概率和假样本的概率之间的差异。具体来说,判别器的目标可以概括如下:
正确地区分真实数据和生成数据:判别器的主要任务是区分真实数据和生成数据,因此其目标是将真实数据标记为1(或true)并将生成数据标记为0(或false)。
训练一个有效的分类器:判别器不仅需要在真实数据和生成数据之间进行区分,还需要学习一个有效的分类器,以便在训练过程中逐渐提高它的准确度和判别能力。
最小化交叉熵损失函数:在训练过程中,判别器的损失函数通常采用交叉熵损失函数,目标是最小化真实数据和生成数据之间的分类误差,从而逐渐提高判别器的准确度和区分能力。
判别器的目标是非常明确的,其主要任务是区分真实数据和生成数据,并在训练过程中逐渐提高准确度和判别能力。判别器在GAN中起到了非常重要的作用,其优秀的性能和学习能力是保证GAN训练稳定和有效的关键。
## Discriminatorclass Discriminator(nn.Layer):
def __init__(self):
super(Discriminator,self).__init__()
self.dgan = nn.Sequential(
# input [B, 1, 32, 32] -> [B, 64, 16, 16]
nn.Conv2D(1,64,4,2,1),
nn.BatchNorm2D(64),
nn.LeakyReLU(0.2), # state size. [B, 64, 16, 16] -> [B, 128, 8, 8]
nn.Conv2D(64,64*2,4,2,1),
nn.BatchNorm2D(64*2),
nn.LeakyReLU(0.2), # state size. [B, 128, 8, 8] -> [B, 256, 4, 4]
nn.Conv2D(64*2,64*4,4,2,1),
nn.BatchNorm2D(64*4),
nn.LeakyReLU(0.2), # state size. [B, 256, 4, 4] -> [B, 1, 1, 1] -> [B, 1]
nn.Conv2D(64*4,1,4,1,0),
nn.Sigmoid(),
) def forward(self, inputs):
output = self.dgan(inputs) return outputDnet = Discriminator() Dnet.apply(weight_init) # 权值初始化print(Dnet)
Discriminator(
(dgan): Sequential(
(0): Conv2D(1, 64, kernel_size=[4, 4], stride=[2, 2], padding=1, data_format=NCHW)
(1): BatchNorm2D(num_features=64, momentum=0.9, epsilon=1e-05)
(2): LeakyReLU(negative_slope=0.2)
(3): Conv2D(64, 128, kernel_size=[4, 4], stride=[2, 2], padding=1, data_format=NCHW)
(4): BatchNorm2D(num_features=128, momentum=0.9, epsilon=1e-05)
(5): LeakyReLU(negative_slope=0.2)
(6): Conv2D(128, 256, kernel_size=[4, 4], stride=[2, 2], padding=1, data_format=NCHW)
(7): BatchNorm2D(num_features=256, momentum=0.9, epsilon=1e-05)
(8): LeakyReLU(negative_slope=0.2)
(9): Conv2D(256, 1, kernel_size=[4, 4], data_format=NCHW)
(10): Sigmoid()
)
)# 损失函数选择loss = nn.BCELoss()# 设置相应的标签 real=1,fake = 0real_label = 1.fake_label = 0.#优化器optimizerG = optim.Adam(parameters = Gnet.parameters(),learning_rate = 0.003,beta1 = 0.5,beta2 = 0.999) optimizerD = optim.Adam(parameters=Dnet.parameters(),learning_rate=0.003,beta1 = 0.5,beta2 = 0.999) epoch = 40 # 设置相应的迭代次数losses = [[],[]]
################# ## training ## #################import timefor num in range(1,epoch+1):
epoch_start_time = time.time() for batch_id,(data,target) in enumerate(dataloader): ##########################################
# updata D is log(D(X)) + log(1-D(G(Z)))
#
##########################################
# D的训练分为两个部分,我们先只使用真实图片训练Dnet
optimizerD.clear_grad() # 梯度清零
real_img = data # 真实数据
re_size = real_img.shape[0]
label = paddle.full((re_size,1,1,1),real_label,dtype = "float32")
out_real = Dnet(real_img)
Derr_real = loss(out_real,label) # 真实图片训练
Derr_real.backward() # 第二部分,用生成器生成图片进行训练
noise = paddle.randn([re_size,100,1,1],dtype = "float32")
fake_img = Gnet(noise) #
label = paddle.full((re_size,1,1,1),fake_label,dtype = "float32")
out_fake = Dnet(fake_img.detach()) # detach 不计算梯度
Derr_fake = loss(out_fake,label)
Derr_fake.backward()
optimizerD.step()
optimizerD.clear_grad()
Derr = Derr_fake + Derr_real # 损失
losses[0].append(Derr.numpy()[0]) #######################
# update G is log(D(G(x)))
#
#######################
# 只训练Gnet,注意这里的不同,我们把生成器生成的图片当成真实图片训练Gnet,这是由于Gnet的目标就是使生成的图片尽量是真实图片
optimizerG.clear_grad()
noise = paddle.randn([re_size,100,1,1],dtype = "float32")
fake_img = Gnet(noise)
label = paddle.full((re_size,1,1,1),real_label,dtype = "float32")
output_fake = Dnet(fake_img)
Gerr_loss = loss(output_fake,label)
Gerr_loss.backward()
optimizerG.step()
optimizerG.clear_grad()
losses[1].append(Gerr_loss.numpy()[0])
# 这里是载入相应的noise使用生成器生成相应的图片,进行查看效果
if epoch%10 == 0:
batch_size = 1
noise = paddle.randn([batch_size,100,1,1],dtype = "float32")
generated_image = Gnet(noise).numpy() import cv2
generated_image = np.transpose(generated_image, (0, 2, 3, 1))
generated_image = cv2.resize(generated_image[0], (32, 32), interpolation=cv2.INTER_LINEAR)
plt.imshow(generated_image)
plt.show() print('[%03d/%03d] %2.2f sec(s) D loss: %3.6f G Loss: %3.6f ' % \
(num, epoch, \
time.time()-epoch_start_time, \
Derr.numpy()[0], \
Gerr_loss.numpy()[0] ))paddle.save(Gnet.state_dict(), "work/Gnet.pdparams") paddle.save(optimizerG.state_dict(), "work/Gadam.pdopt") paddle.save(Dnet.state_dict(), "work/Dnet.pdparams") paddle.save(optimizerD.state_dict(), "work/Dadam.pdopt")
Dlayer_state_dict = paddle.load("work/Dnet.pdparams")
Dopt_state_dict = paddle.load("work/Dadam.pdopt")
Dnet.set_state_dict(Dlayer_state_dict)
optimizerD.set_state_dict(Dopt_state_dict)
Glayer_state_dict = paddle.load("work/Gnet.pdparams")
Gopt_state_dict = paddle.load("work/Gadam.pdopt")
Gnet.set_state_dict(Glayer_state_dict)
optimizerG.set_state_dict(Gopt_state_dict)batch_size = 1noise = paddle.randn([batch_size,100,1,1],dtype = "float32") generated_image = Gnet(noise).numpy()import cv2 generated_image = np.transpose(generated_image, (0, 2, 3, 1)) generated_image = cv2.resize(generated_image[0], (32, 32), interpolation=cv2.INTER_LINEAR) plt.imshow(generated_image) plt.show()
<Figure size 640x480 with 1 Axes>
- 对于复杂的数据集,DCGAN的表现可能不够好。虽然DCGAN使用了深度卷积神经网络,但是它仍然无法捕获一些复杂的数据集中的细节特征,例如物体之间的局部关系等。
- 在训练过程中,它可能容易出现训练不稳定的问题。DCGAN中的GAN模型训练是通过两个神经网络之间的博弈来实现的,这导致训练过程非常不稳定。在实践中,经常需要手动调整超参数和选择合适的损失函数才能使训练过程收敛。
- DCGAN生成的图像可能存在一定程度的模糊或失真。在生成大型高分辨率图像时,DCGAN难以保证图像细节的准确性和清晰度。这可能是由于GAN模型本身的生成机制不同于自然图像处理的方式。
- 生成的结果缺乏多样性。DCGAN在生成图像时缺乏多样性,即它往往只能生成与训练集类似的图像,而无法生成更多样化的图像。这使得生成的输出有时候会缺乏想象力和创造力。
以上就是手把手带你学会GAN的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 999
999