
近年来,世界模范的火热似乎可以在机器人操作中起到一些至关重要的作用。而对于具身智能来说,现阶段manipulation是最需要突破的点。特别是针对以下long horizon的任务,如何构建机器人“小脑”,来实现各种复杂的操作要求,是当下最需要解决的问题。
在使用LM应用在机器人上时,比较常用的做法是将各类API提供在context里面,然后让LLM根据任务prompt自动编写planning代码,可参考文章:
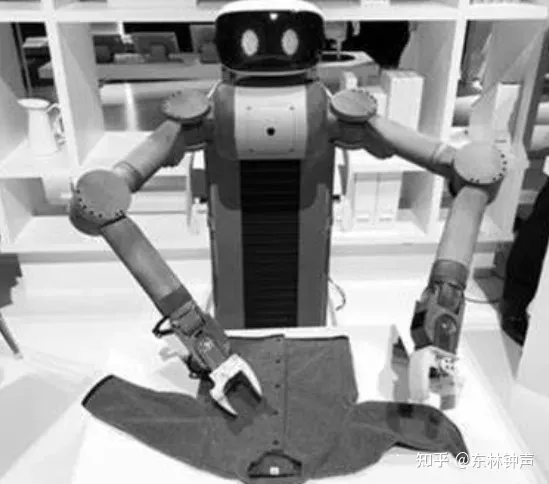
这种方法优点是非常直观,可以比较清晰地把握任务的拆解逻辑,比如移动到A,抓起B,移动到C,放下B。但是这种操作的前提是能够把整个任务拆分成原子操作(移动、抓取、放置等)。但是如果是一些比较复杂的任务,比如叠衣服这种任务,其是天然难以进行任务拆分的,那这个时候应该怎么办?其实对于manipulation来说,我们大量面对的应该是这种long horizon且难以进行拆分的任务。
针对long horizon且难以进行拆分的manipulation任务,比较好的处理方法是研究模仿学习,比如diffusion policy或者ACT这种,对整个操作trajectory进行建模拟合。但是这种方法都会遇到一个问题,就是没有办法很好的处理累积误差——而这个问题的本质就是缺乏一套有效地反馈机制。
还是以叠衣服为例,人在叠衣服的时候,其实会根据视觉获取的衣服变化,不断地调整操作策略,最终将衣服叠到想要的样子。那这个里面其实有一个比较隐含但是非常重要的点:人大概知道什么样的操作,会导致衣物发生什么样的变化。那么进一步,就是人其实具备一个关于衣物变形的模型,能够大概知道什么样的输入,会导致状态(衣物摆放)的变化(视觉层面就是像素级别),更加具体的可以表示为:

这本书给出了一份关于python这门优美语言的精要的参考。作者通过一个完整而清晰的入门指引将你带入python的乐园,随后在语法、类型和对象、运算符与表达式、控制流函数与函数编程、类及面向对象编程、模块和包、输入输出、执行环境等多方面给出了详尽的讲解。如果你想加入 python的世界,David M beazley的这本书可不要错过哦。 (封面是最新英文版的,中文版貌似只译到第二版)
 1
1

☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

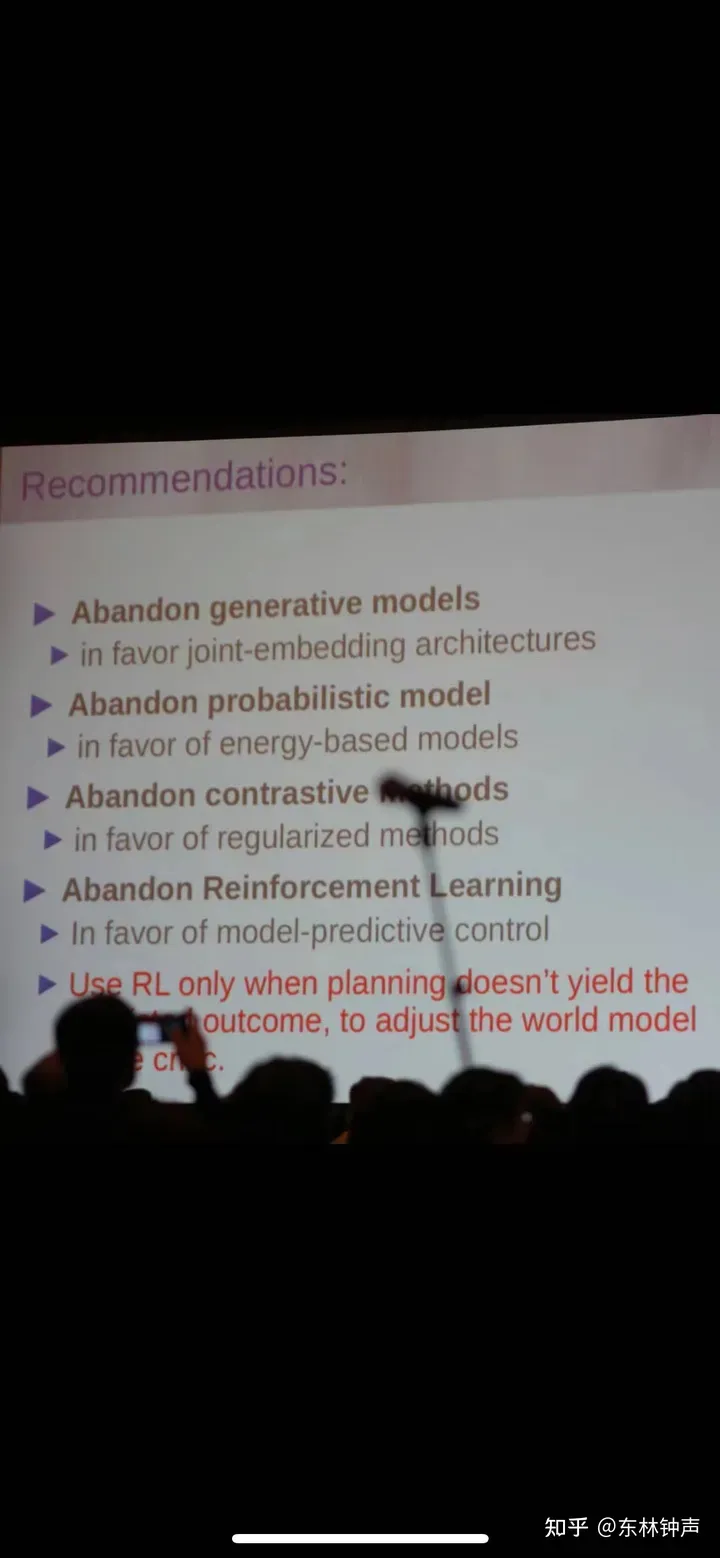
SORA其实给了一剂强心针,就是只要数据够多,我能用transformer+diffusion layer,硬train一个可以理解并预测变化的模型f。假设我们已经有了一个非常强的预测衣物随操作变化的模型f,那这个时候叠衣服就可以通过像素级别的衣物状态反馈,通过Model Predictive Control的思路,构建一个视觉伺服(Visual Servo)的策略,将衣服叠到我们想要的状态。这一点其实在LeCun最近的一些“暴论”上也得到了验证:
以上就是关于面向机器人操作的世界模型的一点思考的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号





 337
337






















