
导读
常用的机器人物理仿真软件包括ROS/Gazebo、V-REP、Webots、Adams等,其中有些是收费的,有些是开源的,功能各有不同。V-REP作为一款跨平台的机器人仿真软件,提供了丰富的机器人模型和控制接口,帮助开发者快速验证算法并低成本开发。V-REP的主要特性包括:
跨平台支持(Windows、MacOS、Linux);多种编程方式(嵌入式脚本、插件、附加组件、ROS节点等);多种编程语言(C/C++、Python、Java、Lua、Matlab、Octave等);超过400种不同的应用编程接口函数;100项ROS服务、30个发布类型、25个ROS订户类型、可拓展;4个物理引擎(ODE、Bullet、Vortex、Newton);完整的运动学解算器(适用于任何机构的逆运动学和正运动学);内嵌图像处理的视觉传感器(完全可扩展);数据记录与可视化(时距图、X/Y图或三维曲线);支持水/气体喷射的动态颗粒仿真;…1. Gazebo上的机器人模型 由于研究和工作的需要,我花了大量时间研究Gazebo和ROS,包括使用Gazebo自带的C++接口进行模型控制、通过ROS提供的通信接口使用Matlab或Python进行远程控制等。总体而言,Gazebo提供了非常丰富的控制接口,自由度较大,是一个值得学习的平台,但其缺点也很明显,只能在Linux系统下运行,入门门槛较高,当初花了很长时间才弄明白如何使用Gazebo进行仿真。Gazebo在调试方面的功能不够完善,如果想要可视化数据,需要结合ROS提供的插件,这方面我没有深入研究,感觉接口不够友好。
以下是我在研究过程中定义和设计的一个仿人双足机器人模型和一个Demo(模型略显简陋,请忽略其外观)。我用它来模拟双足仿人机器人在Sagittal平面内的步行过程。这个模型的运动学模型构建参考了Kajita教授编写的《仿人机器人》一书,步行过程的控制理论也参考了书中关于倒立摆模型和Capture Point理论等内容。
在构建模型的过程中,我首先设计好模型的尺寸和关节信息,然后通过编写URDF文件逐步搭建,过程较为繁琐且不直观。模型控制使用的是Gazebo提供的C++接口,使用C++语言编写了传感信息感知和运动控制代码。后来也尝试使用Python进行远程控制,但发现Gazebo的可视化、数据观测和代码调试功能不够人性化,未来有机会再分享基于Gazebo平台的模型搭建和控制代码开发过程。
附:《仿人机器人》一书的电子版下载地址,请扫码:
 2. V-REP简介 V-REP(Virtual Robot Experimentation Platform)是一款跨平台的仿真软件(最新版本已更名为CoppeliaSim,但本教程仍使用旧名V-REP),可在Windows和Linux上稳定运行,且软件体积较小。官方介绍表明其入门门槛较低,原生提供大量模型,并附带Demo程序和控制接口。V-REP对用户非常友好,文档齐全,EDU版本无功能限制,且跨平台,因此初学者可以选择熟悉的平台进行学习,本文选择了Windows 10系统。下图展示了一些官方提供的机器人模型。
2. V-REP简介 V-REP(Virtual Robot Experimentation Platform)是一款跨平台的仿真软件(最新版本已更名为CoppeliaSim,但本教程仍使用旧名V-REP),可在Windows和Linux上稳定运行,且软件体积较小。官方介绍表明其入门门槛较低,原生提供大量模型,并附带Demo程序和控制接口。V-REP对用户非常友好,文档齐全,EDU版本无功能限制,且跨平台,因此初学者可以选择熟悉的平台进行学习,本文选择了Windows 10系统。下图展示了一些官方提供的机器人模型。

 V-REP默认的开发语言是Lua,其语法与C语言相似,因此有C/C++基础的读者很容易上手。当然,我们也可以使用Java、Python、Matlab等语言进行开发。后续教程将逐步教大家如何通过代码控制自己的机器人模型。以下是一个官方的宣传视频,更多视频请访问:https://www.php.cn/link/4e8e25b6b415f4026f6fd44b5ddd7c76
V-REP默认的开发语言是Lua,其语法与C语言相似,因此有C/C++基础的读者很容易上手。当然,我们也可以使用Java、Python、Matlab等语言进行开发。后续教程将逐步教大家如何通过代码控制自己的机器人模型。以下是一个官方的宣传视频,更多视频请访问:https://www.php.cn/link/4e8e25b6b415f4026f6fd44b5ddd7c76
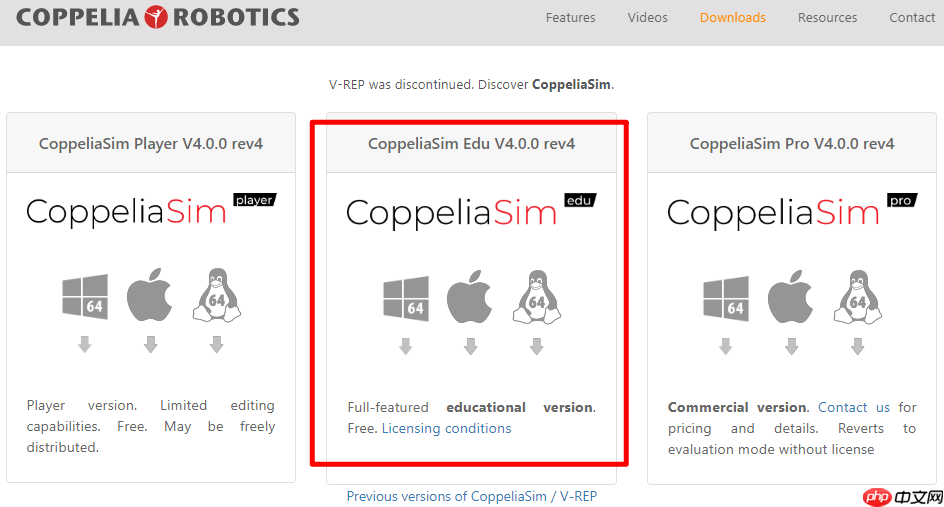 V-REP下载界面
V-REP下载界面
注意,V-REP的最新版已更名为CoppeliaSim,下载时需注意名称并选择Windows平台,点击CoppeliaSim Edu, Installer即可获取安装版的下载链接,Binaries版本为免安装版,我未使用此版本。
 下载完成后,直接双击安装文件运行即可,可自定义安装路径,与在Windows平台安装其他软件无异。
下载完成后,直接双击安装文件运行即可,可自定义安装路径,与在Windows平台安装其他软件无异。
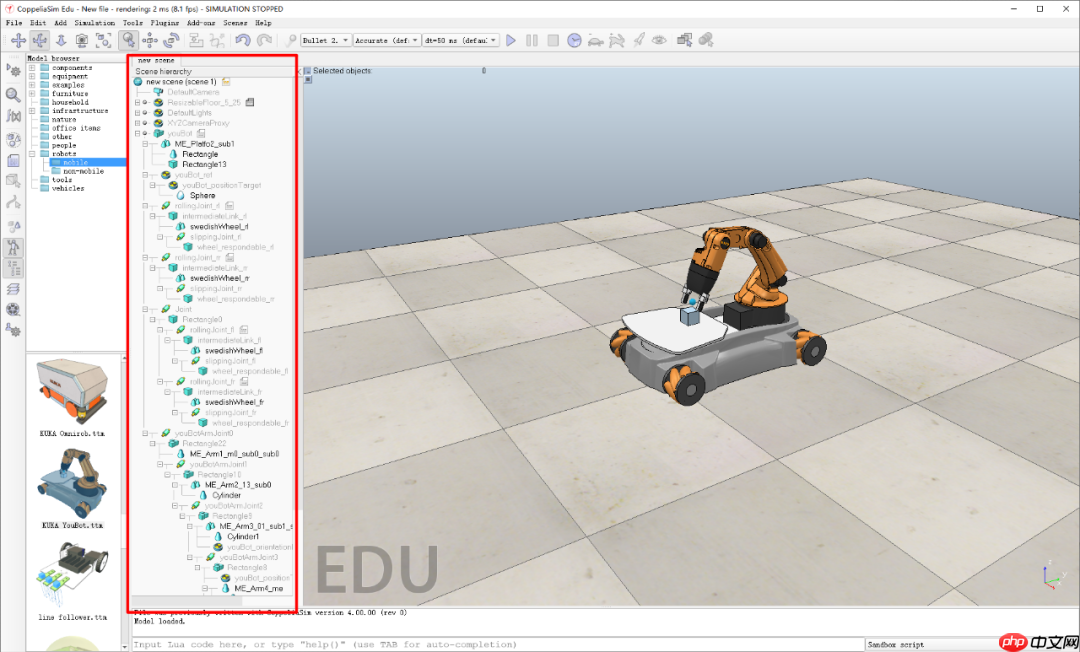
 V-REP软件首页
V-REP软件首页
左侧的菜单栏包含一些常用的平移、旋转等操作按钮,鼠标单击后可对模型进行平移和旋转等操作,与普通的三维软件无异,大家可以探索菜单栏,随意点击。左侧的Model browser是V-REP官方提供的机器人模型,包含许多现成的机器人模型,可以选择对应的模型,鼠标单击后直接拖入右侧的仿真环境。
 有了机器人模型后,左侧面板会显示机器人的基本组件,包括连杆和关节等,点击左侧条目时,仿真环境中的机器人会自动标注所点击条目的位置,方便查看和调整。菜单栏中有几个按钮,可以点击这些按钮来运行V-REP内置的该机器人模型的Demo控制代码,大家可以尝试多个机器人模型,点击运行按钮来尝试运行。
有了机器人模型后,左侧面板会显示机器人的基本组件,包括连杆和关节等,点击左侧条目时,仿真环境中的机器人会自动标注所点击条目的位置,方便查看和调整。菜单栏中有几个按钮,可以点击这些按钮来运行V-REP内置的该机器人模型的Demo控制代码,大家可以尝试多个机器人模型,点击运行按钮来尝试运行。
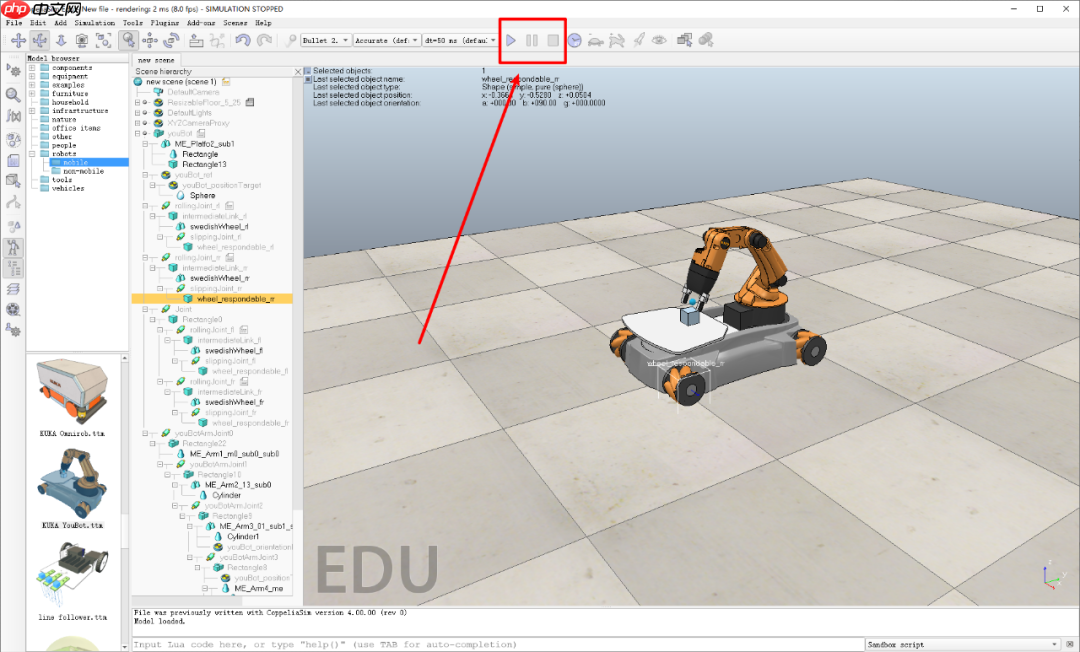 V-REP的机器人仿真运行界面
V-REP的机器人仿真运行界面
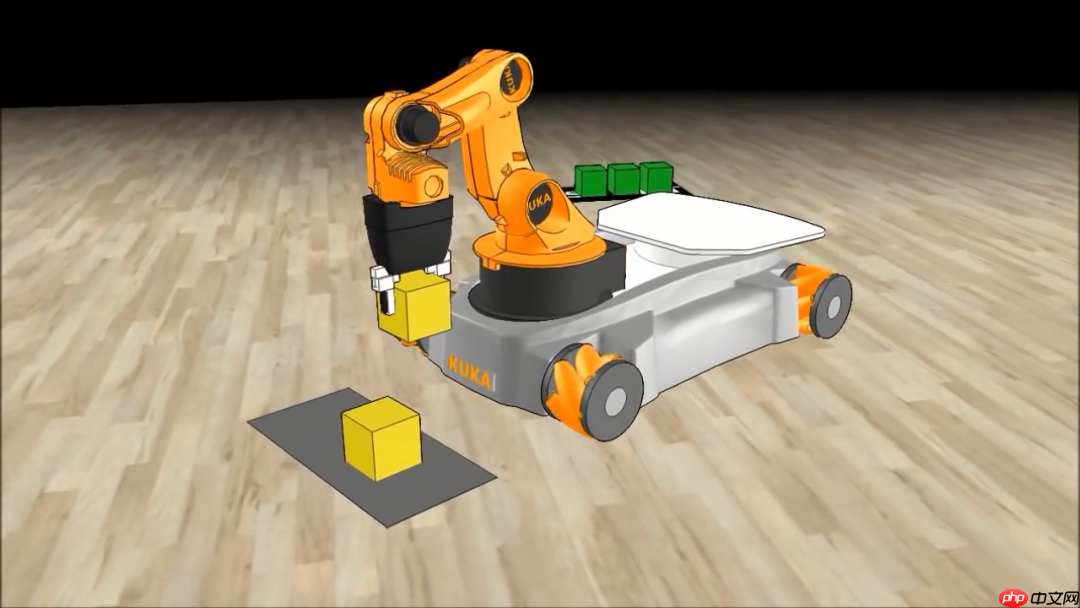
这里录制了一个使用YouBot机器人演示的Demo视频:
此外,双击机器人模型旁边的文件按钮可以打开该机器人模型的Demo控制代码,默认使用Lua语言编写,用户可以方便地更改,并基于这些基础接口开发自己的机器人控制代码。
 V-REP的控制脚本
V-REP的控制脚本
至此,V-REP的安装和基本使用介绍完毕,更高级的用法将在后续教程中逐步学习。
 后记 本文是自学笔记的第一篇,介绍了V-REP环境的安装和简单使用过程,更高级的用法将在后续文章中逐步介绍,本项目涉及到的代码都将发布在Github上的V-REP-YouBot-Demo项目。作者知识有限,有不正确和不合理的地方还望读者能够指出来,大家共同学习和进步,不胜感激!
后记 本文是自学笔记的第一篇,介绍了V-REP环境的安装和简单使用过程,更高级的用法将在后续文章中逐步介绍,本项目涉及到的代码都将发布在Github上的V-REP-YouBot-Demo项目。作者知识有限,有不正确和不合理的地方还望读者能够指出来,大家共同学习和进步,不胜感激!
本项目Github地址:https://www.php.cn/link/89fb52e6ca126344d7c493e22ad1e1f7
想要获取最新文章,欢迎关注公众号:博士的沙漏。
以上就是【V-REP自学笔记(一)】平台介绍和软件安装的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告


Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 194
194



















